1 自动驾驶还要走很远的路
2016年,兰德智库指出,一套自动驾驶系统至少需要测试110亿英里,才能达到量产应用条件。110亿英里是什么概念?可以通过一个直观的例子来解释。地球和太阳的距离是0.932亿英里,一套成熟的自动驾驶系统需要在地球和太阳之间往返59趟才能达到量产的标准。目前,互联网巨头谷歌公司旗下的自动驾驶团队 Waymo 通过Robotexi一边载人一边收集路况信息,才仅仅跑完了0.1亿英里。
所以说自动驾驶还要走很远的路。110亿英里,是比较保守的距离,按这个进度,实现自动驾驶还需要好几个世纪。那时候说不定人类都能低空飞行了,还要自动驾驶干嘛呢?所以人们开始寻找加速验证的方法,那么有没有办法加速自动驾驶系统的验证呢?虹科为您一一解答。
2 仿真测试,量化安全
在这个软件定义汽车的时代,一套成熟的自动驾驶系统是可以移植、更新的。智能驾驶系统包含了感知、决策、执行部分。其中,执行部分需要与汽车的各执行系统连接,线控底盘、转向、制动系统等。这一部分博世、大陆等汽车电子供应商已经做的非常成熟了,之所以要路测110亿英里,是因为实现自动驾驶的难点主要还是感知和决策部分。这两部分也是自动驾驶系统的关键。感知决策部分能够集成在一起,亦可单打独斗。因此,诞生了英伟达、腾讯等大公司的仿真测试平台。开发者将感知决策算法输入到平台中,仿真测试平台将算法融入到虚拟的小车中。虚拟车辆在诸多繁杂的仿真场景中测试,反馈算法的结果。
刚才提到Waymo已经完成了0.1亿英里的路测,而Waymo已经完成了150亿英里的仿真测试。仿真测试无论从成本还是效率上都要胜于路测,所以仿真测试是自动驾驶落地的必经之路。
仿真测试可以分为五个仿真级别。如下表所示。
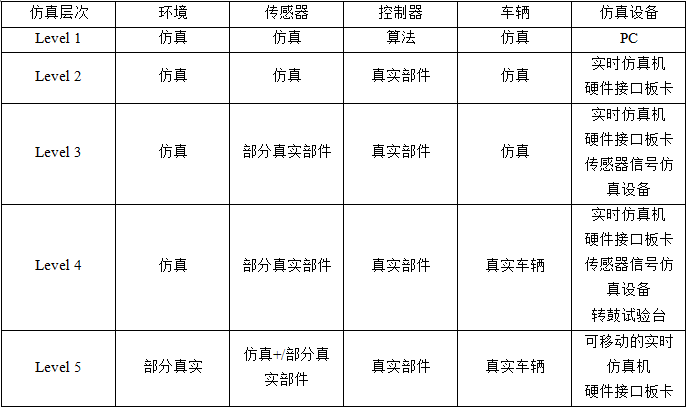
这一级别的仿真测试基本是完全基于电脑来进行算法的验证。自动驾驶算法可以是Simulink模型的格式,也可以是C/Python等代码的格式。虚拟场景和传感器由VTD、PreScan等场景仿真软件提供。虚拟车辆由CarSim、veDYNA等车辆动力学软件提供。可以在PC环境中运行三者的联合仿真,进行测试。其中的虚拟传感器可以采用理想传感器,发送真值数据;也可以采用复杂传感器,考虑到激光雷达、毫米波雷达等不同传感器的特性,发送带误差的数据或Raw Data。

这一级别的仿真测试基本是完全基于电脑来进行算法的验证。自动驾驶算法可以是Simulink模型的格式,也可以是C/Python等代码的格式。虚拟场景和传感器由VTD、PreScan等场景仿真软件提供。虚拟车辆由CarSim、veDYNA等车辆动力学软件提供。可以在PC环境中运行三者的联合仿真,进行测试。其中的虚拟传感器可以采用理想传感器,发送真值数据;也可以采用复杂传感器,考虑到激光雷达、毫米波雷达等不同传感器的特性,发送带误差的数据或Raw Data。
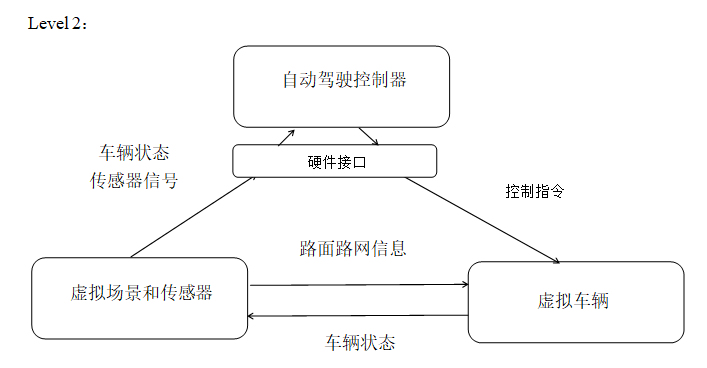
场景仿真软件和车辆动力学软件一般在实时仿真机运行,用来保证运行的实时性。自动驾驶控制器中包含自动驾驶算法,并通过硬件接口板卡(如CAN板卡、以太网板卡)与实时仿真机相连,进行车辆状态、传感器信号和控制指令的交互。其中,传感器信号需要按照实车上使用的接口和协议进行发送。
对于使用工控机的情况,或者其他实时性要求不是太高,而且通信接口可以满足测试需求的情况,也可以使用PC作为场景仿真和车辆动力学软件的运行环境。

与上一层次相比,部分传感器使用真实部件,将场景仿真软件中的虚拟传感器的信号发送至传感器信号仿真设备,进而由传感器信号仿真设备发送传感器信号,影响真实传感器的输出。
值得注意的是,这一层次中部分传感器使用真实部件,大多情况下并不是要对传感器的真实部件进行测试,而是因为供应商不能提供该传感器输出信号的协议,从而不能仅仅使用虚拟传感器进行信号仿真。 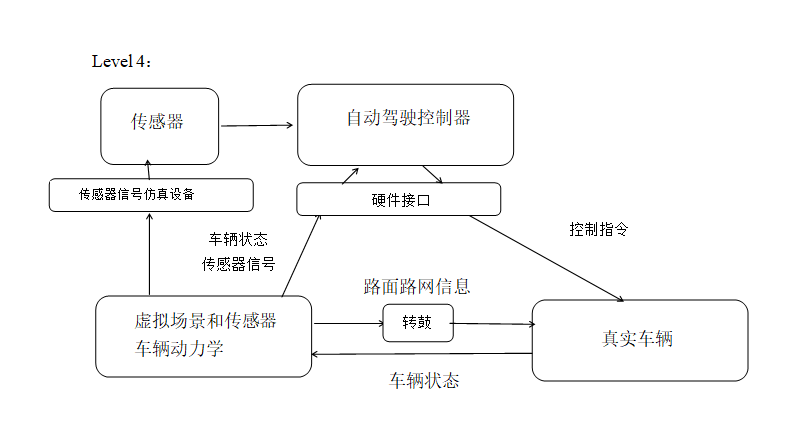
场景仿真和车辆动力学仿真软件联合仿真,以真实车辆反馈的轮速、车轮转角等作为输入,输出行驶阻力和转向阻力,通过转毂试验台反馈给真实车辆,实现闭环测试。这其中的难点在于行驶阻力和转向阻力模拟的真实性。
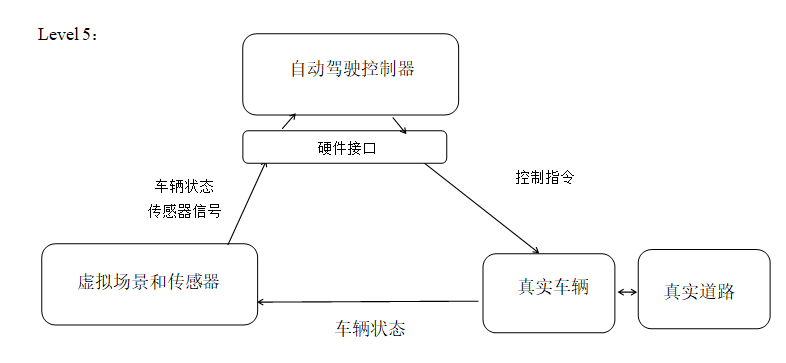
这个层次的仿真测试,相比上一层次,不再将真实车辆置于转鼓试验台上,而是使用真实车辆在真实的道路上行驶,故一般也称为车辆在环测试。
由于车辆在运动过程中,不再使用传感器信号仿真设备,而是仅使用场景仿真软件仿真传感器信号(有时也使用部分真实传感器,并布置真实交通物体),并通过硬件接口板卡发送给控制器。这一层次仿真的好处是,使用真实车辆在真实道路上行驶,车辆动力学特性完全真实;而且,交通物体的状态通过虚拟传感器模拟,不会发生碰撞等危险情况,从而可以对一些危险场景进行测试。
Level 1 到 Level 5的区别在于:级别越高,包含的真实元素越多。
通过不同需求来选择不同级别的仿真测试,得到仿真测试结果反馈,就能够评估算法或系统的安全性,这样有助于OEM或Tier One有针对性的设计产品、改进产品。









